

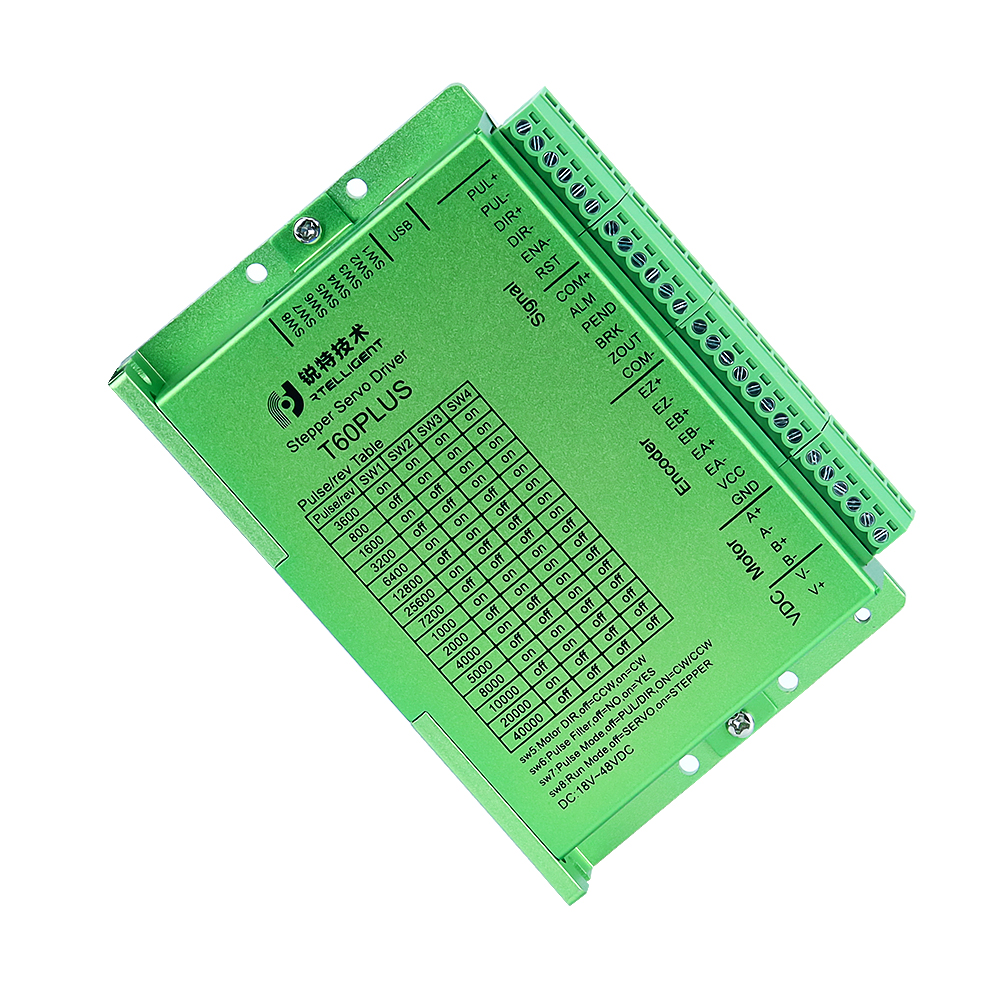


Pulse Control 2 Phase Closed Loop Stepper Drive T60Plus


Panimula ng Produkto



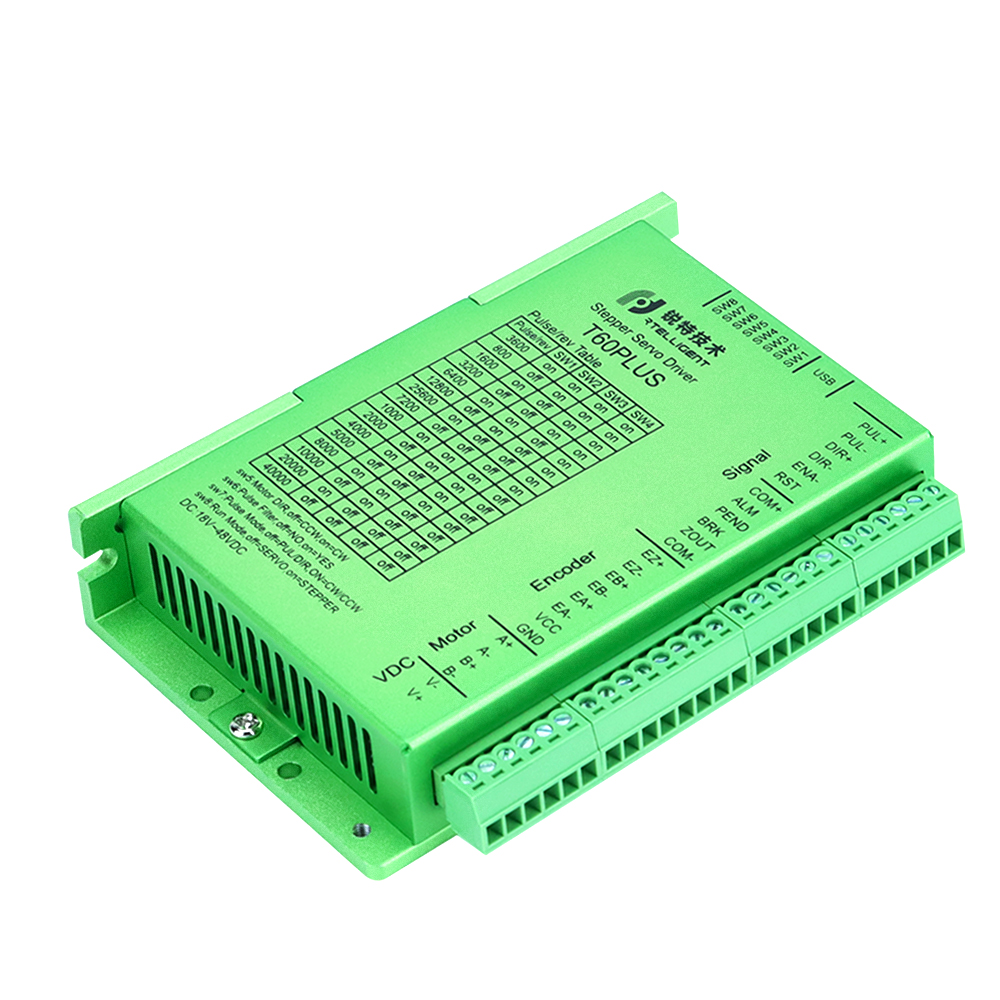
Koneksyon

Mga tampok
| Power supply | 18~48VDC |
| Kontrolin ang katumpakan | 4000 Pulse/r |
| Pulse mode | Direksyon at pulso, CW/CCW double pulse, A/B quadrature pulse |
| Kasalukuyang kontrol | Algoritmo ng kontrol ng servo vector |
| Setting ng subdivision | Setting ng DIP switch, 15 na opsyon (o setting ng pag-debug ng software) |
| Saklaw ng bilis | Maginoo 1200~1500rpm, hanggang 4000rpm |
| Pagpigil ng resonance | Awtomatikong pagkalkula ng resonance point para pigilan ang mid-frequency vibration |
| Pagsasaayos ng parameter ng PID | Debugging software upang ayusin ang mga katangian ng PID ng motor |
| Filter ng pulso | 2MHz digital signal filter |
| Output ng alarm | Output ng alarm para sa overcurrent, overvoltage, error sa posisyon, atbp. |
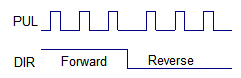
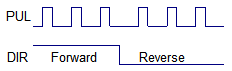
Pulse Mode
Ang interface ng signal ng karaniwang T series drive ay hugis-pulso, at ang T60PLUS V3.0 ay maaaring makatanggap ng tatlong uri ng mga signal ng pulso command.
| Pulse at direksyon (PUL + DIR) |
|
| Dobleng pulso (CW +CCW) |
|
| Orthogonal pulse (A/ B orthogonal pulse) | 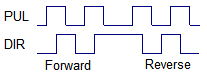 |
Setting ng Micro-stepping
| Pulse/rev | SW1 | SW2 | SW3 | SW4 | Remarks |
| 3600 | on | on | on | on | Ang DIP switch ay ibinaling sa "3600" na estado at ang testing software ay maaaring malayang baguhin ang iba pang mga subdivision. |
| 800 | off | on | on | on | |
| 1600 | on | off | on | on | |
| 3200 | off | off | on | on | |
| 6400 | on | on | off | on | |
| 12800 | off | on | off | on | |
| 25600 | on | off | off | on | |
| 7200 | off | off | off | on | |
| 1000 | on | on | on | off | |
| 2000 | off | on | on | off | |
| 4000 | on | off | on | off | |
| 5000 | off | off | on | off | |
| 8000 | on | on | off | off | |
| 10000 | off | on | off | off | |
| 20000 | on | off | off | off | |
| 40000 | off | off | off | off |
Setting ng Micro-stepping
Nasunog ang mga terminal ng drive?
1. Kung may short circuit sa pagitan ng mga terminal, tingnan kung short-circuit ang winding ng motor.
2. Kung ang panloob na pagtutol sa pagitan ng mga terminal ay masyadong malaki, mangyaring suriin.
3. Kung ang labis na paghihinang ay idinagdag sa koneksyon sa pagitan ng mga wire upang bumuo ng isang solder ball.
May alarma ang closed loop stepper drive?
1. Kung may error sa koneksyon para sa mga wiring ng encoder, pakitiyak na gumamit ng tamang extension cable ng encoder, o makipag-ugnayan sa Rtelligent kung hindi ka makakagamit ng extension cable para sa iba pang dahilan.
2.Suriin kung nasira ang encoder tulad ng output ng signal.
-
 Manwal ng Gumagamit ng Rtelligent T60PLUS V3.0
Manwal ng Gumagamit ng Rtelligent T60PLUS V3.0




